軸屋敬介 | Keisuke Jikuya
Home
Note
Blog
Post
Keep your Eyes on the Lane: Real-time Attention-guided Lane Detection
Keep your Eyes on the Lane: Real-time Attention-guided Lane Detection
https://github.com/lucastabelini/LaneATT
Dec 13, 2022
Lane Detection,
CVPR (2021)
概要
YOLOv3やSSDのようなアンカーベースのモデルであるLaneATTを提案
大域的情報の取得のためにAttentionも使用
CULaneとTuSimpleとLLAMASのデータセットで最先端手法を凌駕
新規性・差分
高速な学習・推論が可能(250FPSを達成)
アンカーベースのAttentionメカニズムは他ドメインでも有用な可能性
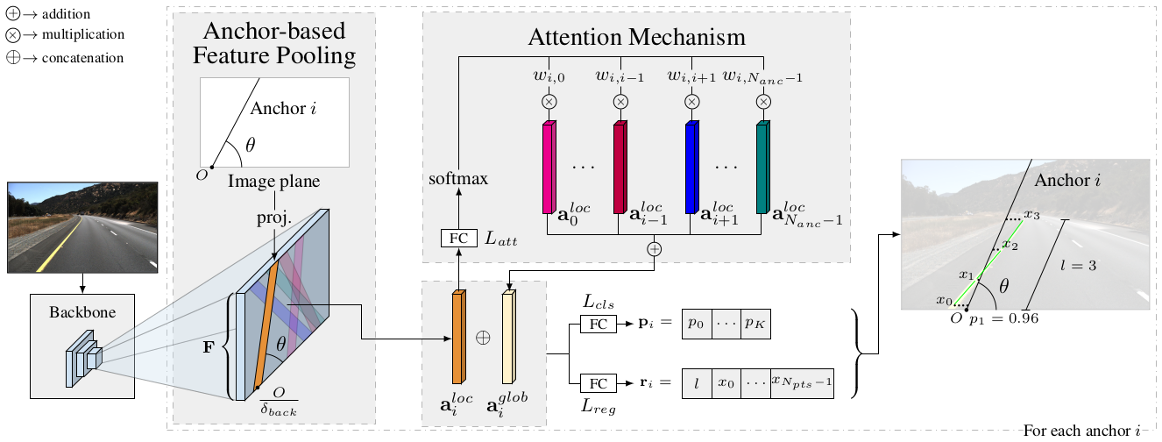
アイデア
画像の境界の1点と方向θで定義される仮想の直線をアンカーと定義する
ResNetなどの学習済みCNNで特徴マップを生成
アンカーに該当する特徴マップを抽出する
抽出した特徴マップ同士でAttentionを取る
局所情報のみだと車で隠れている場合に予測できないため
全結合に通して、クラスラベル(白線、黄線、背景など)とアンカーとの水平距離、長さを予測
NMSアルゴリズムを適用
結果
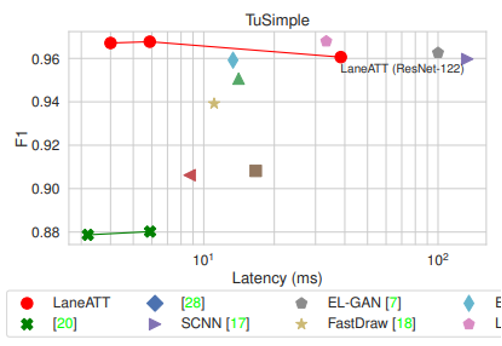
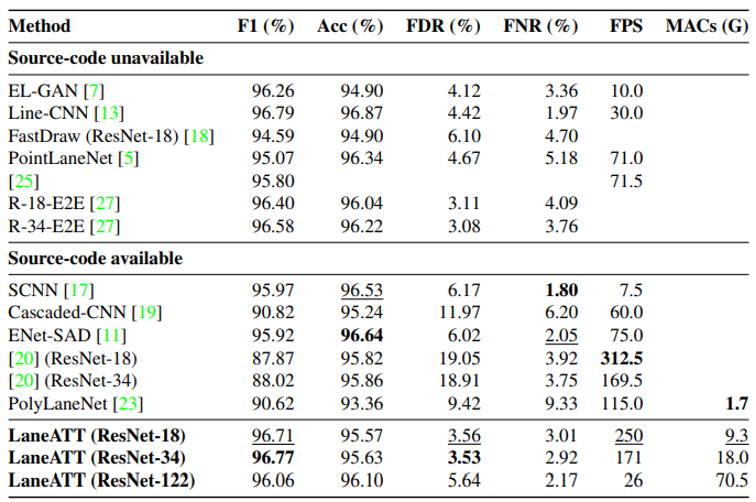
TuSimple
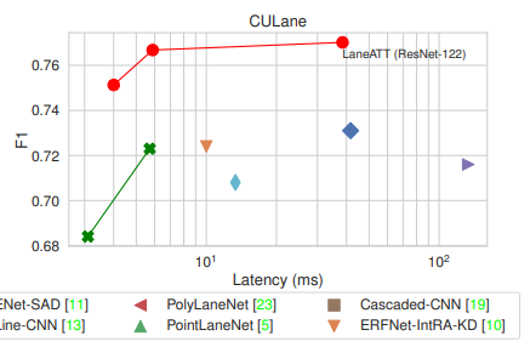
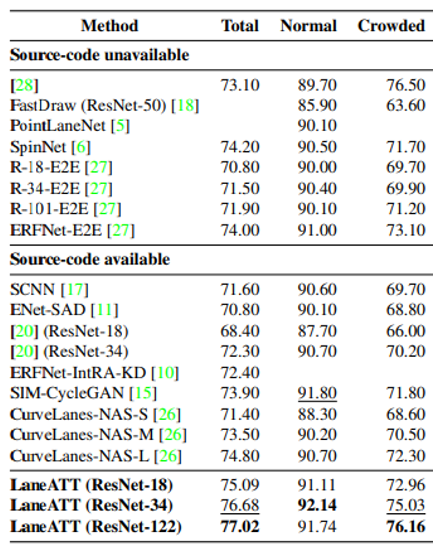
CULane
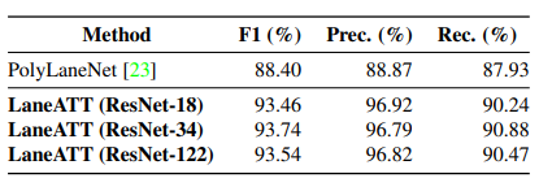
LLAMAS
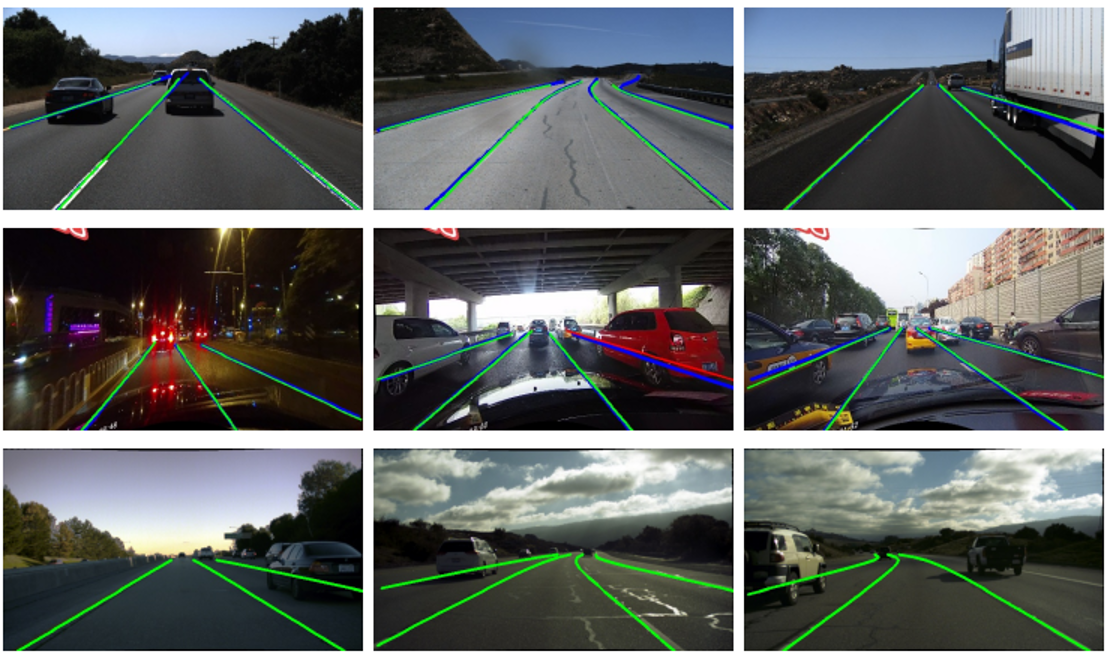
可視化
青は正解、緑と赤が予測
上段がTuSimple、中段がCULane、下段がLLAMAS
一覧へ戻る