軸屋敬介 | Keisuke Jikuya
Home
Note
Blog
Post
LineNet: a Zoomable CNN for Crowdsourced High Definition Maps Modeling in Urban Environments
LineNet: a Zoomable CNN for Crowdsourced High Definition Maps Modeling in Urban Environments
https://arxiv.org/abs/1807.05696
Dec 13, 2022
Lane Detection,
arXiv (2018)
概要
現在のCNNを用いた車線検出の研究はセグメンテーションに限定されており、直感的でなく不正確である
HDマップのモデリングのために、LP層とZoomモジュールを持つCNN手法のLineNetを提案
車線検出用のデータセットTTLaneを紹介
新規性・差分
LineNetとTTLaneを組み合わせることで、HDマップのモデリングを行うパイプラインを初めて提案
アイデア
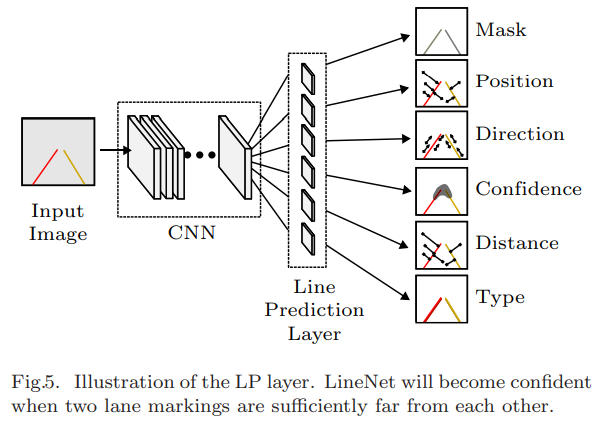
Line Prediction(LP)層
車線の位置決めと分類のために設計された追加層
Mask、Position、Direction、Confidence、Distance、Typeの6つのブランチがある
Mask
一定の幅(32pixel)で描かれたストローク
Position
アンカーポイントから線への最小距離のベクトル
Direction
車線の向き
Confidence
ネットワークが車線を見れているかの信頼度
Distance
アンカーポイントから線への最小距離の長さ
Type
6種類のマーキング(白実線、白破線、黄実線、黄破線、二重線、その他)
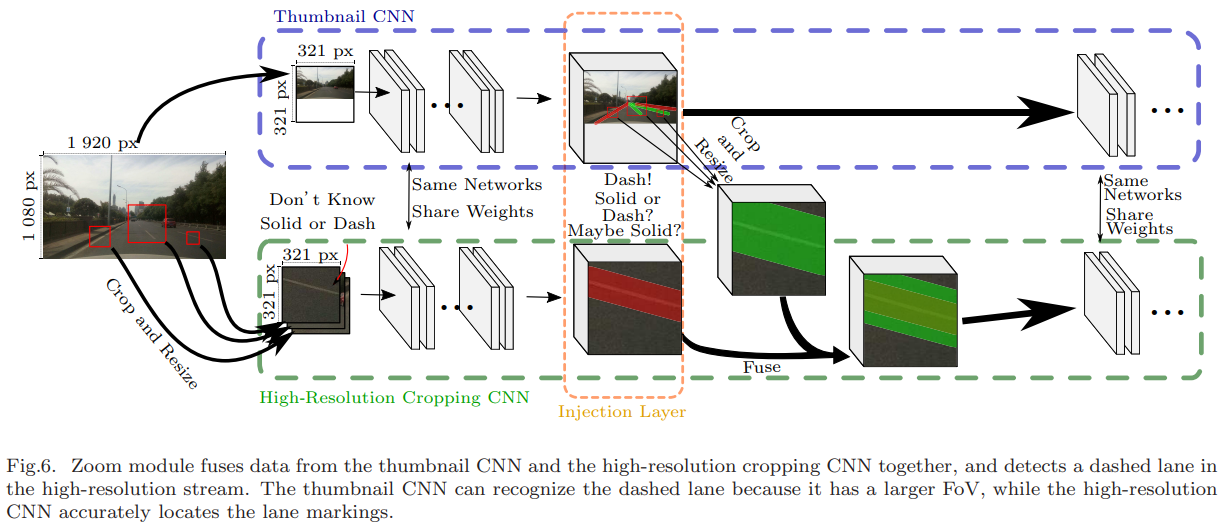
Zoomモジュール
ネットワーク構造を変えずに、視野を任意のサイズに変更できる
サムネイルCNNと高解像度トリミングCNNに分割
2つのCNNは重みを共有する
サムネイルCNN
グローバル特徴を獲得
高解像度トリミングCNN
詳細に「見る」
インジェクション層で2つのCNNの特徴を融合
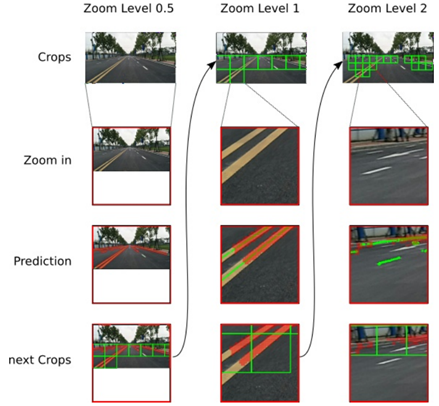
LP層で確信度が低い領域についてZoomモジュールを複数回適用する
0.5~16倍まで
まだ不連続な点のため、DBSCANでクラスタリング
結果
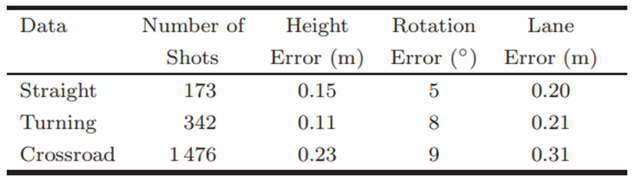
定量評価
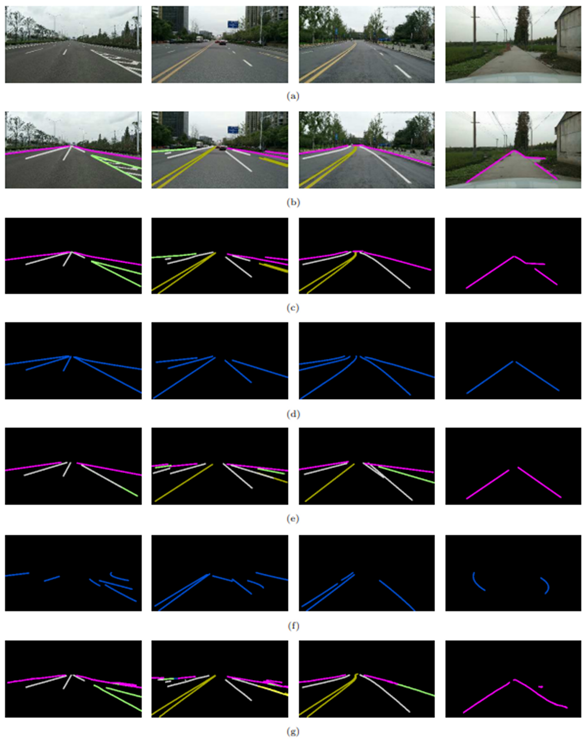
定性評価
(a)原画像 (b)(c)正解 (d)SCNN (e)Mask E-CNN (f)MLD-CRF (g)LineNet
LineNetは二重線検出や複雑なシーンにも強い
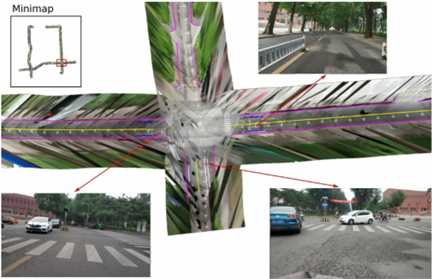
HD地図モデリング
車線の平均誤差がGPSの5mから31.3cmへと大幅に改善
一覧へ戻る