軸屋敬介 | Keisuke Jikuya
Home
Note
Blog
Post
CLRNet: Cross Layer Refinement Network for Lane Detection
CLRNet: Cross Layer Refinement Network for Lane Detection
https://github.com/Turoad/CLRNet
Dec 15, 2022
Lane Detection,
CVPR (2022)
概要
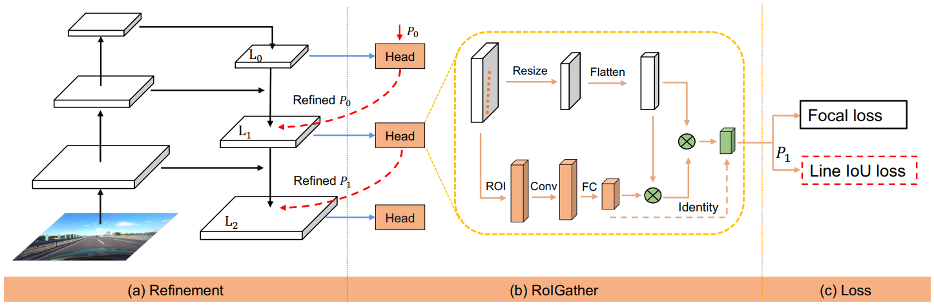
特徴抽出したFPN構造の特徴マップを、上位から下位まで複合的に活用する車線検出手法であるCross Layer Refinement Network (CLRNet)を提案
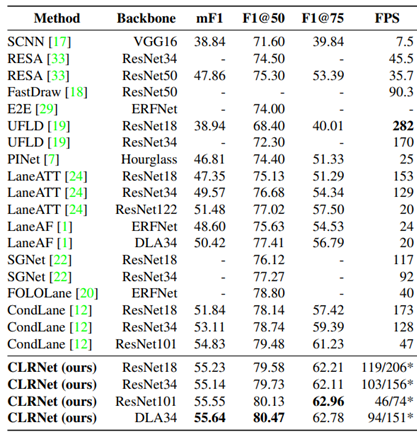
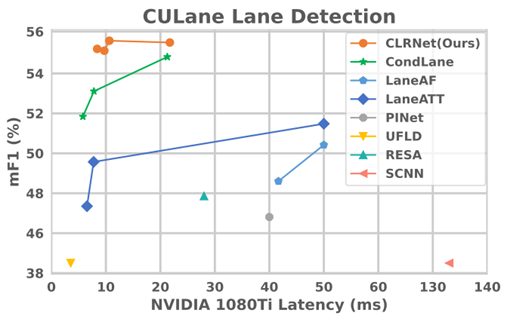
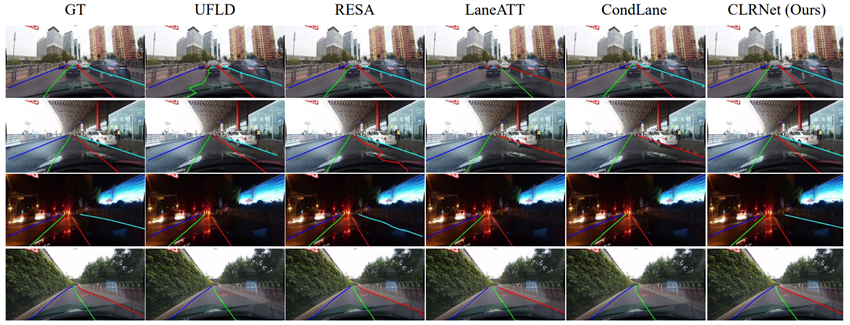
CULaneとTuSimpleとLLAMASのデータセットで従来手法を上回る
新規性・差分
車線の部分領域と全体を組み合わせて大域的な特徴表現を獲得するROIGatherを使用
車線の検出結果に対するIoUとしてLIoU(Line IoU)を定義し、LIoUの最大化を損失関数に含んだ
アイデア
二次元の点列$𝑃$(レーン事前分布)をネットワークで出力
前景と背景の確率、線の長さ、角度、予測と正解の水平距離
ResNetをBackboneとし、FPN構造から特徴マップ$𝐿_0, 𝐿_1, 𝐿_2$を生成
点列$P$と特徴マップ$L$を組み合わせる
\[P_t = P_{t-1} \circ R_t (L_{t-1},P_{t-1})\]
上位から下位の特徴を活用するため
点列Pをもとに特徴マップ$L$をROIAlignで抽出
Attentionをとる
\[\mathcal{G} = \mathcal{W}\mathcal{X}^T_f\]
\[\mathcal{W} = f(\frac{\mathcal{X}^T_p \mathcal{X}_f}{\sqrt{C}})\]
Line IoU Loss
点を別々の変数として扱うため、既存の距離損失を用いると精度が低くなってしまう
そこで、車線専用のLossを提案
\[IoU = \frac{d^\omicron_i}{d^u_i} = \frac{\min(x^p_i+e, x^q_i+e) - \max(x^p_i+e, x^q_i+e)}{\max(x^p_i-e, x^q_i-e) - \min(x^p_i-e, x^q_i-e)}\]
\[LIoU = \frac{\sum^N_{i=1} d^\omicron_i}{\sum^N_{i=1} d^u_i}\]
結果
CULane
LLAMAS
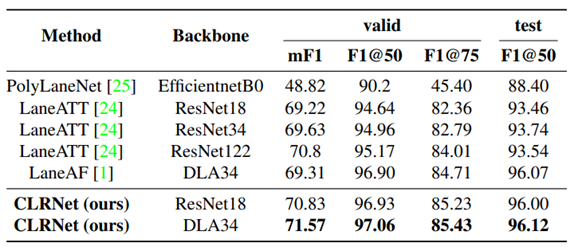
TuSimple
一覧へ戻る